
- 工业滤水器系列
- 精密过滤器,精密激光打孔过滤器
- 篮式过滤器,快开盲板过滤器
- 立式除污器|卧式直通除污器
- 工业滤水器,电动过滤器
- 电动过滤器,全自动滤水器
- 除氧器系列
- 真空除氧器,真空除氧装置
- 旋膜式除氧器|热力除氧器
- 常温式除氧器,过滤式除氧器
- 海绵铁除氧器,全自动海绵铁除氧器
- 除氧器水封,除氧器溢流水封装置
- 除氧器蒸汽回收装置
- 三位一体真空电化学除氧器
- 解析除氧器(不锈钢)
- 大气式喷雾除氧器
- 胶球清洗系列
- 胶球清洗装置,收球网
- 凝汽器清洁专用胶球
- 胶球清洗装置,二次滤网
- 胶球清洗系统,凝汽器管道清洗
- 胶球清洗装置,胶球泵
- 中央空调清洗装置,胶球清洗系统
- 胶球清洗装置,分汇器
- 凝汽器胶球清洗装置
- 冷凝器自动在线胶球清洗装置
- 胶球清洗,装球室
- 锅炉消声器系列
- 柴油发电机消音器,柴油机排气消声
- 不锈钢小孔消音器,小孔喷注消声器
- 真空泵排气消音器,真空泵消声器
- 吹管消音器,锅炉吹扫消音器
- 风机消音器,锅炉风机消声器
- 锅炉消声器|蒸汽消声器
- 锅炉排气消音器,安全阀消音器
- 加药装置系列
- 锅炉加药装置|磷酸盐加药装置
- 汽液两相流疏水器
- 汽液两相流液位控制器|疏水器
- 高加蒸汽自动疏水阀
- 汽液两相流疏水器
- 射水抽气器系列
- 射水抽气器|多通道射水抽气器
- 射水抽气器逆止阀
- 冷油器系列
- 管式冷油器说明及技术改造
- 冷油器,油冷却器
- 真空滤油机
- 真空滤油机,双级真空滤油机
- 流体装卸鹤管设备
- 汽车鹤管
- 火车鹤管
- 底部鹤管
- 顶部鹤管
- 液化气(装卸车鹤管)
- AL2543液氨鹤管
- 鹤管生产现场
- 液体装卸低温鹤管
- 陆用流体装卸鹤管
- 锅炉取样器
- 飞灰取样器
- 煤粉取样器
- 取样冷却器

锅炉消音器|锅炉消声器安装用途
锅炉消音器|锅炉消声器压力温度材质
蒸汽消音器|蒸汽消声器厂家
蒸汽消音器|蒸汽消声器结构特点
蒸汽消音器|蒸汽消声器工作原理
安全阀消音器|安全阀消声器厂家
风机消音器|风机消声器安装用途
柴油机消音器|柴油机消声器结构特点
柴油机消音器|柴油机消声器工作原理
真空泵消音器|真空泵消声器压力温度材质
管道消音器|管道消声器厂家安装用途
管道消音器|管道消声器压力温度材质
小孔消音器|小孔消声器结构特点
小孔消音器|小孔消声器工作原理
排气消音器|排气消声器厂家安装用途
排气消音器|排气消声器工作原理
放散消音器|放散消声器安装用途
放散消音器|放散消声器结构特点
吹管消音器|吹管消声器工作原理
吹管消音器|吹管消声器压力温度材质
旋膜式除氧器厂家工作原理安装用途结构特点
真空除氧器厂家工作原理安装用途结构特点
热力除氧器厂家工作原理安装用途结构特点
三位一体真空电化学除氧器工作原理
解析除氧器厂家工作原理安装用途结构特点
全自动滤水器厂家工作原理安装用途结构特点
电动滤水器厂家工作原理安装用途结构特点
手动滤水器厂家工作原理安装用途结构特点
工业滤水器厂家工作原理安装用途结构特点
反冲洗滤水器厂家工作原理安装用途结构特点
二次滤网厂家工作原理安装用途结构特点
全自动除污器厂家工作原理安装用途结构特点
电动排污过滤器安装用途结构特点
胶球清洗装置厂家工作原理安装用途结构特点
凝汽器胶球清洗装置工作原理安装用途
冷凝器自动在线清洗装置厂家结构特点
海绵胶球厂家使用用途 剥皮胶球使用特点
金刚砂胶球清洗原理 胶球泵厂家型号选择
取样冷却器厂家工作原理安装用途结构特点
煤粉取样器厂家工作原理安装用途结构特点
飞灰取样器厂家工作原理安装用途结构特点
列管式冷油器厂家工作原理安装用途结构特点
射水抽气器厂家工作原理安装用途结构特点
汽液两相流疏水器厂家工作原理安装用途结构特点
自动滤水器,自动排污过滤器筒体的计算与设计
自动滤水器,自动排污过滤器筒体的计算与设计,利用三维建模软件对自动滤水器筒体进行了实体建摸,利用有限元分析软件对筒体进行了计算分析。通过分析计算,显示出筒体的变形情况,同时可以得出筒体上任一位置的应力值和位移值。并针对每次计算结果,能够对筒体结构进行适时改进。计算结果也为自动滤水器筒体的设计和制造提供了科学依据。
自动滤水器主要用于环境特别恶劣的水质的处理,对水中的各种漂浮物和沉积物以及其它污物杂质进行过滤。可根据水质的不同情况进行调节和选用。其机械部分由筒体、行星摆线针轮减速器、过滤筒、自动反冲排污转动机构、排污管和进出水管等部件组成。自动滤水器的工作原理是含杂质的水通过进水管进入筒体,经过筒体内滤筒过滤后从出水管排出。当满足预定的控制清污、排污要求时,电动减速装置启动,带动排污装置转动,附着在滤网上的污物借助自动滤水器内部过滤后的清洁水反冲洗,经排污装置下面管口流出,实现过滤、自动清洗的目的。
自动滤水器,自动排污过滤器工作时压力为1。0MРa,在这样的高压下为了实现其上述功能,使流量和压力损失达到设计要求,除了要求过滤筒有较好的流通性以外,对其筒体还要求有很好的密封性和足够的强度。因此,在自动滤水器,自动排污过滤器出厂前,必须按照国家标准在高压状态下进行密封试验和强度试验,以检验产品是否密封良好,其强度和刚度是否满足要求。所以在设计时须对筒体工作状态下的受力情况和变形作深入系统的探讨,进行符合实际情况的精确的计算。但是由于筒体结构复杂,零部件较多,以及承受的载荷也很复杂,设计时无法采用经典力学公式对其进行简化计算,常采用类比法或凭经验设计,这样设计出来的产品,往往造成产品不合格或材料浪费现象,增加了制造成本,延长了制造周期。因此,本文采用现代设计技术,使用三维设计软件对筒体建模,并利用有限元软件计算,从而得出筒体各点的应力云图和位移云图,以及各点的具体数值,这就可以对筒体的结构进行分析,改善受力薄弱的零部件的强度。
1筒体的三维实体建模
筒体外形为圆筒形,由上筒体和下筒体通过法兰螺栓联接而成,上筒体上焊接出水管道,下筒体上焊接进水管道及检修孔,整个结构通过四条支腿与地脚螺栓相联%从结构和工作原理的分析可知,筒体是一个三维方向均不完全对称的空间连续弹性体,因此不能将结构复杂的筒体简化为轴对称的平面问题进行分析,而宜采用三维实体模型%建立筒体实体模型时,要充分利用三维设计软件集功能强大、技术创新、基于特征的先进的造型技术,快速、精确地建立起筒体的三维实体模型%为了方便以后的有限元分析和对结构的修改,一般建立参数化模型%建模时应尽量使模型与实际结构相一致,同时由于筒体结构非常复杂,零部件多,如果建立完整的计算模型,将会导致计算量很大,因此在建模过程中进行了一定的简化处理[3]%简化的部位主要包括以下几个方面:(1)略去或简化了一些对计算结果影响不大的零件,如省略了吊耳、铭牌、压力表等零件,简化了零件的倒角等要素;(2)假定所有焊缝为连续全焊透,且不考虑焊缝处材料特性的变化,认为焊接处的材料特性与相邻结构的材料特性相同;(3)自动滤水器工作时,进出水管通过阀门与外面的管道相联,做水压试验时,关闭阀门,在筒体内施加水压,因此,计算时简化为用法兰盖封闭进出水管;上筒体与下筒体法兰之间,进出水管法兰与法兰盖之间通过螺栓联接,螺栓被施加较大的预紧力,法兰之间的紧密贴合,能够进行力的传递,为了简化计算,将各组法兰假设为一整体%图1为自动滤水器筒体的三维实体模型图%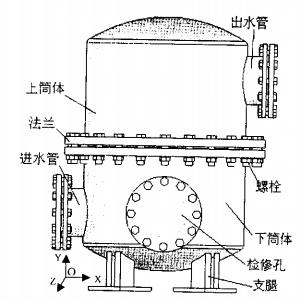
图1筒体的实体模型图
2筒体有限元模型的建立
实体建模完成后,将三维模型导入有限元分析软件,进行定义材料属性、设定网格类型、施加约束和载荷、划分网格等前处理工作,然后进行求解%在计算时可认为各焊接件本身无缺陷,焊接牢固,无虚焊、漏焊、松脱现象万,焊方接数后据残余应力小,不足以影响分析结果%2%1分析类型的确定及筒体材料参数的设置分析类型的选择是由模型的载荷条件及要计算的响应确定的%筒体按照国家标准在高压状态下进行密封试验和强度试验时,水压为1%4x106N/m2,并在这压力下保持10min,同碰撞、冲击、震动、爆炸等载荷状态有着本质的不同,故视为静态分析,即载荷不随时间变化的系统平衡分析%筒体所有零部件采用的材料均为16MnR钢,属于各向同性材料,从材料库中输入材料的参数,其特性参数及力学性能如下:弹性模量:E=2%06x1011N/m2泊松比:u=0%3密度:p=7840kg/m3屈服应力:rs=3。4MPa2%2单元类型的选择在有限元分析中,确定单元类型是很重要的%在结构静力分析中,单元类型包括:线单元、二维单元、三维实体单元%选取单元类型一般原则是:一维单元用于离散“线”类结构;二维单元用于离散“面”类结构;三维单元则用于离散“体”类结构%从阶数的角度,单元类型可以分为线性单元、二阶单元和高阶单元%其中,二阶单元的特点有:其位移是二阶变化的,故单元上的应力、应变状态是线性变化的;二阶单元在描述曲线边界或曲面时,要比线性单元更精确,而对单元扭曲变形不敏感;采用的单元个数和自由度个数较少,而得到的结果精度较高%线性单元求解精度较低,高阶单元的结点数较多,在网格数量相同的情况下,由高阶单元组成的模型规模比二阶单元要大得多%综上所述,在本课题中,由于筒体零部件多,结构非常复杂,每个零部件的几何形状及其受力情况有较大的差异,因此不适合采用1D或2D单元,宜采用3D实体单元类型%由于筒体几何形状的复杂性,不适宜于采用六面体单元,考虑到提高计算精度,故采用四面体二次单元划分网格%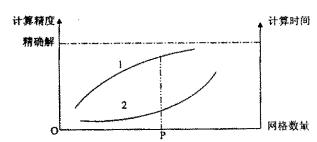
2%3网格的划分网格数量的大小将影响筒体计算结果的精度程度和计算规模的大小%一般来讲,网格划得越细,计算精度会有所提高,同时,网格划得越细,产生的单元数、结点数及自由度数就越多,计算也就变得越复杂,所需的计算机资源、CPU运行时间也就越多[。]%图2描述了计算精度和所耗时间与网格数量的变化图%图中曲线1表示结构中的计算精度随网格数量的变化情况,曲线2代表了计算时间与网格数量的关系%从图中可以看出,当网格数量较少时增加网格数量可以使计算精度明显提高,而计算时间不会有很大的变化。当网格数量增加到一定程度后,再继续增加网格数量,计算精度提高甚微,而计算时间却大幅度增加。图2中P点处的网格数量,使得模型既有比较高的计算精度,同时计算时间又不是太长,因此是比较合理的网格数量。在实际计算中,可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。本课题经过多次计算,当网格尺寸大小为15mm,公差为0。75mm时,继续减少网格尺寸对计算精度的提高并不明显,但运行时间却显著提高,因此,选用该尺寸进行网格划分。在边界比较曲折、应力比较集中、应力梯度比较大的地方,为了提高计算精度,网格应划得细一些。所得的单元总数为165222,结点数为304679。筒体的网格图如图3所示:图2计算精度和计算时间与网格数量关系图板上的所有结点,设置在其法线方向(Y轴)的平动自由度为零。筒体主要受两个方面的力,即试验时施加的水压力和水自重产生的压力。施加的水压为1。5MPa,其方向为垂直于各受力表面;水自重形成的压力可以通过计算得出,方向也垂直于各受力表面,计算公式为:p=pgh(1)p―――压力,Pa;p―――水的比重,1×103kg/m3;g―――重力加速度,9。8m/s2;h―――受力位置水的深度,m3计算结果输出及分析前处理工作完成之后,提交计算机进行计算。经过计算后,采用后处理方法可以从图中读出各点的应力、位移、应变的值。输出图上自动列出了筒体的大应力、位移值。也可以随意查看各个节点任意方向的应力、位移值。图4是筒体的应力云图,其中输出应力为VonMises应力,该应力是按四强度理论计算的四相当应力,单位为Pa。图5是筒体的x方向的位移云图,单位为mm。
图4筒体应力云谱图从输出云图4可以看出,筒体的大应力值为304。4MPa,位于支腿与下筒体的联接处,其值小于材料的屈服应力,满足强度要求。通过查看筒体的总位移云图可知,筒体的大位移出现在上筒体圆弧面靠左位置,其总位移的大值为0。8mm,该值不算太大,在此不再作详细讨论。从图5可知,筒体x方向的大位移位于出水管法兰位置,达到0。56mm。同时经过测量,图3筒体的网格图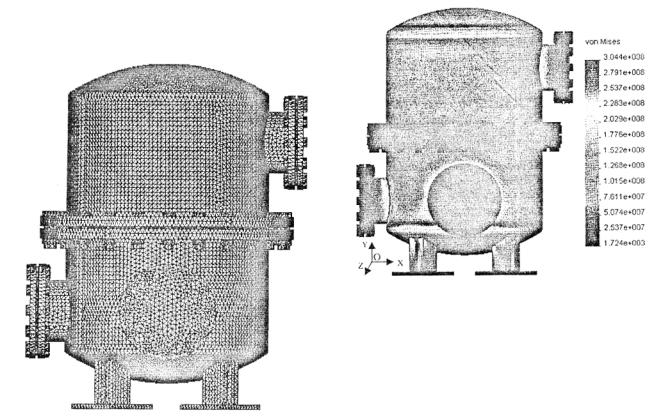
2。4施加边界约束和载荷处理
为了保证筒体在外力作用下保持平衡,必须进行约束处理,引入边界条件。筒体进行水压试验时,由地脚螺栓固定筒体支腿,因此我们设置筒体边界条件为:(1)设置支万腿方螺数栓据孔上所有结点固定;(2)对于支腿底得知上筒体顶部x方向的位移达0。45mm,即上筒体顶部向x的正方向发生偏斜。由于上筒体顶部钻有89的圆孔,转轴通过此孔将减速器和筒体内的排污转动机构联接起来,转轴与上筒体之间用密封环进行密封。作水压试验时,排污转动机构是不会发生偏斜的,如果上筒体偏斜太大,将会导致转轴与上筒体配合位置在左侧间隙太大,密封环失效,造成此处漏水,因此应该严格加以控制。经过分析,施加载荷时上筒体向右发生偏斜,是由于上筒体结构不对称引起的,右边焊接有出水管,造成左右两边的受力不对称,因此,应该在出水管与上筒体联接位置焊接加强筋板,消除位移偏差。
图5筒体x方向位移云谱图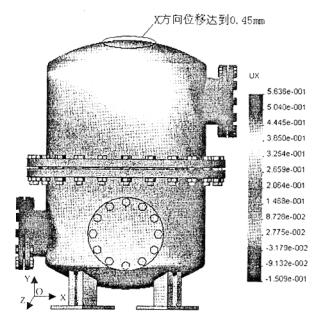
采用三维设计软件建立筒体的实体模型,再导入有限元分析软件进行分析,充分利用三维设计软件建模方便和易于修改的特点,大大简化了建立三维有限元模型的繁琐过程。同时,通过有限元法在筒体设计中的应用,可以找出筒体上应力大和位移大的位置,根据计算结果,可以对筒体进行适时修改,得出合理的结构,保证其有足够的强度和刚度,大大改善了筒体的设计质量,提高了设计的一次成功率,这对提高筒体的设计技术水平、快速相应市场、降低成本、增强企业的竞争力具有十分重要的意义。